实验要求
-
了解页表的作用、ELF 文件格式、操作系统在 x86 架构的基本启动过程。
-
尝试使用 UEFI 加载并跳转到内核执行内核代码。
-
实现基于 uart16550 的串口驱动,使用宏启用输出能力、并启用日志系统。
-
学习并尝试使用调试器对内核进行调试。
实验过程
编译内核 ELF
将0x01内的文件复制到自己的仓库中并替换重复文件,然后在 pkg/kernel
目录下运行 cargo build --release,编译内核。接着找到
./target/release/x86_64-unknown-none/ysos_kernel 。然后使用
readelf -h 指令查看编译产物的 ELF 文件头信息,如下:

- 请查看编译产物的架构相关信息,与配置文件中的描述是否一致?
架构:编译产物的架构是 “Advanced Micro Devices X86-64”,与配置文件中指定的 “x86_64-unknown-none” 目标架构相符。
数据布局:”2’s complement, little endian” 对应于配置文件中的 “target-endian”: “little”。这表示数据在内存中的存储方式是小端序。
指针宽度:编译产物的 Class 为 “ELF64”,这意味着它是一个 64 位的可执行文件,这与配置文件中的 “target-pointer-width”: “64” 一致。
文件类型:编译产物的 Type 为 “EXEC (Executable file)”,这与配置文件中的 “executables”: true 一致,说明生成的是可执行文件。
-
找出内核的入口点,它是被如何控制的?结合源码、链接、加载的过程,谈谈你的理解。
在
kernel.ld的链接脚本中,指定了内核的入口点为_start。这是一个约定的入口点符号,它是链接过程中确定的程序执行的起始位置。在 Rust 中,通常_start会调用Rust runtime的初始化函数,然后进入 main 函数。而在main函数中,boot::entry_point!(kernel_main);使用 boot crate 提供的宏声明内核的入口点为kernel_main。最后加载过程中,通过kernel.ld和main.rs的链接,将内核的入口点确定为kernel_main。 -
请找出编译产物的 segments 的数量,并且用表格的形式说明每一个 segments 的权限、是否对齐等信息。
使用readelf -l指令查看编译产物的segments信息,如下:

绘制表格:
Segment Type VirtAddr Flags(权限) FileSiz Align(对齐)
0 LOAD 0xffffff0000000000 R 0x3a000 0x1000
1 LOAD 0xffffff000003a000 R, E 0x3b000 0x1000
2 LOAD 0xffffff0000075000 R, W 0x7000 0x1000
3 LOAD 0xffffff000007c000 R, W 0x4000 0x1000
4 DYNAMIC 0xffffff000007b0c8 R, W 0x1f8 0x8
5 GNU_RELRO 0xffffff000007b000 R 0x1000 0x1
6 GNU_EH_FRAME 0xffffff00000395d8 R 0x34 0x4
7 GNU_STACK 0x0 R, W 0x0 0x10
——— —————- ——————– ————— ——— —————
注:Flags中 R 表示可读,W 表示可写,E 表示可执行。
在 UEFI 中加载内核
加载相关文件
我首先在 pkg/boot/src/main.rs 中开始工作。为了加载配置文件和内核 ELF
文件,我调用了 fs.rs
中提供的open_file和load_file函数,读取了配置文件中的信息,包括内核栈大小和内核栈地址等。然后,根据配置文件中的信息,我加载了内核
ELF 文件到内存中。
更新控制寄存器
为了进行后续的内存映射操作,我使用了 Cr0::update 函数禁用了根页表的写保护,并在之后进行恢复。
映射内核文件
禁用根页表写保护后,我开始映射内核的代码段、数据段、BSS
段等到虚拟地址空间中。在完善了loadsegment函数后(设置执行权限和写权限),我使用了
pkg/elf/src/lib.rs 中的 map_physical_memory,loadelf和map_range
函数来完成这个任务。
跳转执行
在将内核 ELF 文件加载并映射到适当的虚拟地址空间后,我需要退出 UEFI 的启动服务,并跳转到内核的入口点开始执行内核代码。这一部分代码由原代码提供,它调用了 exit_boot_services 函数退出启动服务,然后使用 jump_to_entry 函数跳转到内核的入口点。
调试内核
我先搭建了基于命令行的GDB和GEF调试环境。先使用’make build DBG_INFO=true’编译内核,修改到无error后使用’make debug” 启动QEMU并进入调试模式,在另一个终端中使用’gdb -q’进入GDB调试环境,打开对应的二进制文件并且设置远程连接后,在’ysos_kernel::init’处设置断点,接着使用’continue’命令运行内核,观察到断点被触发,说明调试环境搭建成功。不过由于此时还有UART的一些部分还未完成,所以在init这个断点处使用vmmap和readelf -l进行检查时发现程序尝试访问无权限的内存。
set_entry函数做了什么?为什么它是 unsafe 的?
答:set_entry 函数的功能应该是设置中断向量表的入口地址为 ELF
文件的入口地址。这个函数被标记为 unsafe
是因为它直接修改了处理器的状态,如果使用不当,可能会导致未定义行为。
jump_to_entry函数做了什么?要传递给内核的参数位于哪里?查询 call 指令的行为和 x86_64 架构的调用约定,借助调试器进行说明。
答:jump_to_entry 函数:
pub unsafe fn jump_to_entry(bootinfo: *const BootInfo, stacktop: u64) -> ! {
assert!(ENTRY != 0, "ENTRY is not set");
asm!("mov rsp, {}; call {}", in(reg) stacktop, in(reg) ENTRY, in("rdi") bootinfo);
unreachable!()
}
jump_to_entry函数的主要目的是将控制权从UEFI引导加载器转移到内核。它通过汇编指令将栈顶地址(stacktop)加载到rsp寄存器(即栈指针),然后调用ENTRY指向的函数。在这个过程中,它还将bootinfo的地址传递给该函数。
在这段代码中,call指令是用来调用一个函数的。在x86_64架构中,call指令会将返回地址(也就是call指令后面的指令的地址)压入栈中,然后跳转到目标地址执行代码。当目标函数执行完毕后,可以通过ret指令返回到call指令后面的指令。
正常来说如果要借助调试器进行说明的话,应该在call指令处设置断点,但是在let (runtime, mmap) = system_table.exit_boot_services(MemoryType::LOADER_DATA);之后的函数都无法再设置断点,因为这个函数会停止
UEFI 的引导服务,其中可能包括用于处理日志的服务。
entry_point!宏做了什么?内核为什么需要使用它声明自己的入口点?
答:entry_point!
宏的功能应该是定义程序的入口点。内核需要使用它声明自己的入口点,因为当加载器加载内核并准备执行它时,需要知道从哪里开始执行。
- 如何为内核提供直接访问物理内存的能力?你知道几种方式?代码中所采用的是哪一种?
答:为内核提供直接访问物理内存的能力通常有以下几种方式:物理地址映射、页表、段式内存管理等。代码中采用的是物理地址映射,通过
map_physical_memory 函数将物理内存映射到虚拟地址空间。
- 为什么 ELF 文件中不描述栈的相关内容?栈是如何被初始化的?它可以被任意放置吗?
答:ELF
文件是一种用于描述程序或库的格式,它不包含关于栈的信息是因为栈的管理通常由操作系统负责。在程序开始运行前,操作系统会为其分配和初始化一段栈空间。栈可以被放置在内存中的任意位置,只要这个位置是可用的,并且有足够的空间来容纳栈的最大可能大小。在代码中,栈的初始化是通过
map_range 函数实现的,它将一段内存区域映射为栈空间。
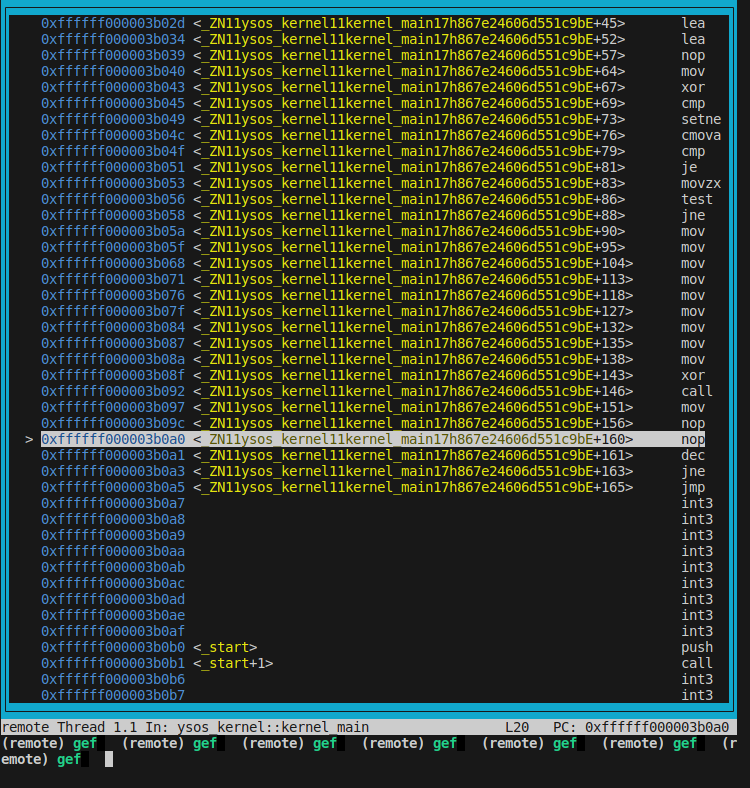
- 请解释指令 layout asm 的功能。倘若想找到当前运行内核所对应的 Rust 源码,应该使用什么 GDB 指令?
答:layout asm 是 GDB
的一个命令,它会打开一个新的窗口来显示当前执行的汇编代码。这在理解程序的底层行为,特别是在调试底层系统代码时非常有用。在这个布局中可以看到程序计数器(PC)指向的当前执行的指令。
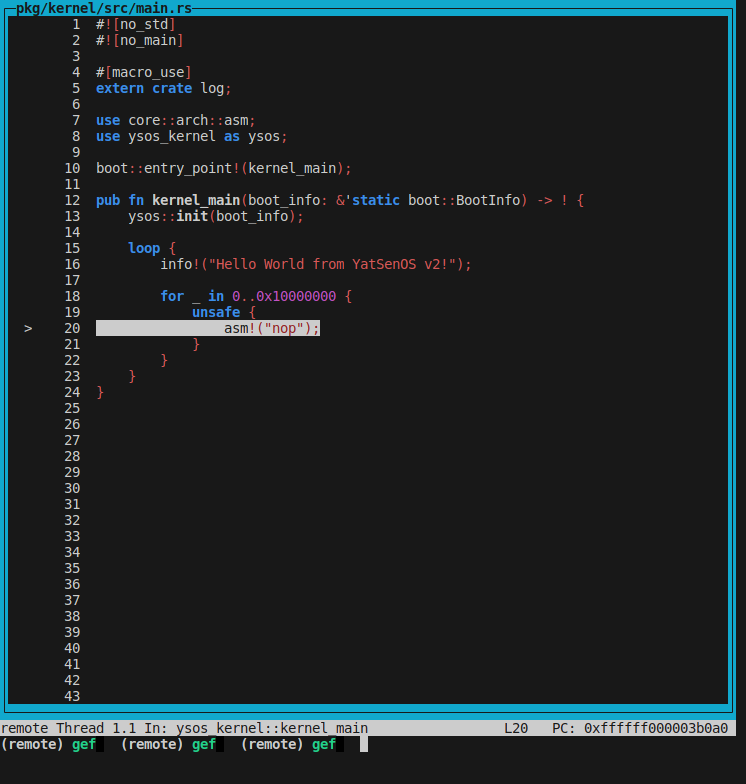
 如果想要找到当前运行的内核对应的 Rust 源代码,可以使用
如果想要找到当前运行的内核对应的 Rust 源代码,可以使用 layout src
命令。这个命令会打开一个新窗口,显示当前执行的源代码。在这个布局中可以看到当前执行的源代码行。
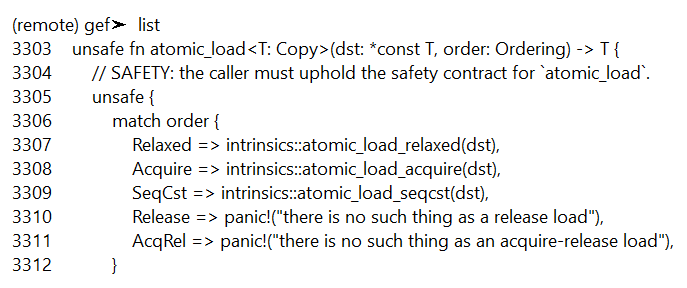
 另外,还可以使用
另外,还可以使用 list
命令来查看源代码。list 命令会显示当前执行点附近的源代码。
- 假如在编译时没有启用
DBG_INFO=true,调试过程会有什么不同?
如果在编译时没有启用 DBG_INFO=true
或者没有使用类似的选项来生成调试信息,那么在调试过程中,你将无法访问到源代码级别的信息。这对于调试过程有以下几种影响:
-
源代码查看:无法使用 GDB 的
list或layout src命令来查看源代码。这意味着无法直接在调试器中看到当前执行的源代码行。 -
源代码级别的断点:无法在源代码级别设置断点。
-
变量和函数名:无法使用变量名或函数名来查看或修改它们的值。例如不能使用
print variable_name这样的命令来打印一个变量的值。 -
栈回溯:在执行
backtrace命令时无法看到函数名,只能看到它们的地址。
这些限制会使得调试过程变得更加困难,因为只可以使用汇编级别的调试功能,比如查看和修改寄存器的值,设置断点等。
- 你如何选择了你的调试环境?截图说明你在调试界面(TUI 或 GUI)上可以获取到哪些信息?
源代码窗口:显示当前正在执行的源代码。当前行会被高亮显示。
汇编窗口:显示当前正在执行的汇编代码。
寄存器窗口:显示当前的寄存器状态。
GDB 控制台:显示 GDB 的输出,并允许你输入 GDB 命令。

UART 与日志输出
串口驱动
被保护的全局静态对象
在内核框架中提供了两个宏来引入互斥锁对内存进行保护。
once_mutex!(pub SERIAL: SerialPort);
guard_access_fn!(pub get_serial(SERIAL: SerialPort));
这样,即使有多个线程同时尝试访问 SerialPort,也只有一个线程可以在同一时间获得访问权。当 MutexGuard 离开作用域时,互斥锁会被自动释放,从而允许其他线程访问 SerialPort。
串口驱动的设计
了解了COM1端口的基地址是0x3F8,同时熟悉了如何访问串口设备的寄存器。
串口驱动的实现
参照了Serial_Ports - OSDev Wiki中的资料,同时使用了’PortWriteOnly” 和
PortReadOnly
来从类型系统上防止误操作的发生,实现了串口驱动的初始化、发送和接收功能。
串口驱动的测试
成功看到 [+] Serial Initialized. 的输出,说明串口驱动已经成功初始化。
日志输出
依照要求完成了 logger.rs
的同时,我对log进行了一定的格式化,并且对不同level的log进行了不同的颜色标记。由于这是系统内核的设计,所以不能使用colored的依赖,好在能使用
ANSI escape codes
,所以分别给Error,Warn,Info,Debug和Trace赋予红黄绿青白五种颜色。
Panic 处理
我将macros.rs中的’panic_handler’做了一些修改,使得输出变成如下形式。
error!("ERROR: panic at '{}' at line {}, column {}:\n\n{:#?}\n\n{}", location.file(), location.line(), location.column(), info, message);
关键代码
在 UEFI 中加载内核
pkg/boot/src/main.rs:
// 1. Load config
let mut file = open_file(bs, CONFIG_PATH);
let mut buf = load_file(bs, &mut file);
let config = Config::parse(&buf);//FIXED
info!("Config: {:#x?}", config);
// 2. Load ELF files
let mut file = open_file(bs, config.kernel_path);
let mut buf = load_file(bs, &mut file);
let elf = xmas_elf::ElfFile::new(&buf).expect("Failed to parse ELF file");//FIXED
unsafe {
set_entry(elf.header.pt2.entry_point() as usize);
}
// 3. Load MemoryMap
let max_mmap_size = system_table.boot_services().memory_map_size();
let mmap_storage = Box::leak(
vec![0; max_mmap_size.map_size + 10 * max_mmap_size.entry_size].into_boxed_slice(),
);
let mmap = system_table
.boot_services()
.memory_map(mmap_storage)
.expect("Failed to get memory map");
let max_phys_addr = mmap
.entries()
.map(|m| m.phys_start + m.page_count * 0x1000)
.max()
.unwrap()
.max(0x1_0000_0000); // include IOAPIC MMIO area
// 4. Map ELF segments, kernel stack and physical memory to virtual memory
let mut page_table = current_page_table();
// FIXED: root page table is readonly, disable write protect (Cr0)
unsafe {
Cr0::update(|flags| {
flags.remove(Cr0Flags::WRITE_PROTECT);
});
}
// FIXED: map physical memory to specific virtual address offset
let mut frame_allocator = UEFIFrameAllocator(bs);
map_physical_memory(config.physical_memory_offset, max_phys_addr, &mut page_table, &mut frame_allocator);
// FIXED: load and map the kernel elf file
load_elf(&elf, config.physical_memory_offset, &mut page_table, &mut frame_allocator)
.expect("Failed to load and map the kernel ELF file");
// FIXED: map kernel stack
map_range(config.kernel_stack_address, config.kernel_stack_size, &mut page_table, &mut frame_allocator)
.expect("Failed to map kernel stack");
// FIXED: recover write protect (Cr0)
unsafe {
Cr0::update(|flags| {
flags.insert(Cr0Flags::WRITE_PROTECT);
});
}
free_elf(bs, elf);
pkg/elf/src/lib.rs:
// FIXED: handle page table flags with segment flags
if segment.flags().is_write() {
page_table_flags.insert(PageTableFlags::WRITABLE);
}
if !segment.flags().is_execute() {
page_table_flags.insert(PageTableFlags::NO_EXECUTE);
}
// unimplemented!("Handle page table flags with segment flags!");
trace!("Segment page table flag: {:?}", page_table_flags);
UART 与日志输出
uart16550.rs:
use core::fmt;
use x86_64::instructions::port::{Port, PortReadOnly, PortWriteOnly};
use bitflags::bitflags;
bitflags! {
pub struct LineControlFlags: u8 {
const DATA_5 = 0x00;
const DATA_6 = 0x01;
const DATA_7 = 0x02;
const DATA_8 = 0x03;
const STOP_1 = 0x00;
const STOP_2 = 0x04;
const PARITY_NONE = 0x00;
const PARITY_ODD = 0x08;
const PARITY_EVEN = 0x18;
const PARITY_MARK = 0x28;
const PARITY_SPACE = 0x38;
}
}
/// A port-mapped UART 16550 serial interface.
pub struct SerialPort {
base: u16,
interrupt_enable: PortWriteOnly<u8>,
line_status: PortReadOnly<u8>,
}
impl SerialPort {
pub const fn new(base: u16) -> Self {
Self {
base,
interrupt_enable: PortWriteOnly::new(base + 1),
line_status: PortReadOnly::new(base + 5),
}
}
/// Initializes the serial port.
pub fn init(&mut self) {
// FIXME: Initialize the serial port
unsafe {
self.interrupt_enable.write(0x00); // Disable all interrupts
Port::<u8>::new(self.base + 3).write(0x80); // Enable DLAB (set baud rate divisor)
Port::<u8>::new(self.base + 0).write(0x03); // Set divisor to 3 (lo byte) 38400 baud
self.interrupt_enable.write(0x00); // (hi byte)
Port::<u8>::new(self.base + 3).write(0x03); // 8 bits, no parity, one stop bit
Port::<u8>::new(self.base + 2).write(0xC7); // Enable FIFO, clear them, with 14-byte threshold
Port::<u8>::new(self.base + 4).write(0x0B); // IRQs enabled, RTS/DSR set
Port::<u8>::new(self.base + 4).write(0x1E); // Set in loopback mode, test the serial chip
Port::<u8>::new(self.base + 0).write(0xAE); // Test serial chip (send byte 0xAE and check if serial returns same byte)
if Port::<u8>::new(self.base + 0).read() != 0xAE {
panic!("Serial port failed to initialize");// If the serial port is not initialized, the system will panic.
}
Port::<u8>::new(self.base + 4).write(0x0F); // Re-enable normal operation
}
let line_control = LineControlFlags::DATA_8 | LineControlFlags::STOP_1 | LineControlFlags::PARITY_NONE;
self.set_line_control(line_control);
}
/// Sends a byte on the serial port.
pub fn send(&mut self, data: u8) {
// FIXME: Send a byte on the serial port
unsafe {
while self.line_status.read() & 0x20 == 0 {
// Wait for the serial port to be ready
}
Port::new(self.base).write(data);
}
}
/// Receives a byte on the serial port no wait.
pub fn receive(&mut self) -> Option<u8> {
// FIXME: Receive a byte on the serial port no wait
unsafe {
while self.line_status.read() & 1 == 0 {
}
Some(Port::new(self.base).read())
}
}
/// Sets the line control register.
pub fn set_line_control(&mut self, flags: LineControlFlags) {
unsafe {
Port::new(self.base + 3).write(flags.bits());
}
}
}
impl fmt::Write for SerialPort {
fn write_str(&mut self, s: &str) -> fmt::Result {
for byte in s.bytes() {
unsafe{
self.send(byte);
}
}
Ok(())
}
}
logger.rs:
use log::{Level, Metadata, Record};
pub fn init() {
static LOGGER: Logger = Logger;
log::set_logger(&LOGGER).unwrap();
// FIXME: Configure the logger
log::set_max_level(log::LevelFilter::Trace);
info!("Logger Initialized.");
}
struct Logger;
impl log::Log for Logger {
fn enabled(&self, _metadata: &Metadata) -> bool {
true
}
fn log(&self, record: &Record) {
if self.enabled(record.metadata()) {
let color = match record.level() {
Level::Error => "\x1B[31m", // red
Level::Warn => "\x1B[33m", // yellow
Level::Info => "\x1B[32m", // green
Level::Debug => "\x1B[36m", // cyan
Level::Trace => "\x1B[37m", // white
};
println!("{}{}: {}\x1B[0m", color, record.level(), record.args());
}
}
fn flush(&self) {}
}
macros.rs:
struct MessageWrapper<'a> {
message: Option<&'a core::fmt::Arguments<'a>>,
}
impl<'a> core::fmt::Display for MessageWrapper<'a> {
fn fmt(&self, f: &mut core::fmt::Formatter<'_>) -> core::fmt::Result {
match &self.message {
Some(args) => core::fmt::write(f, **args),
None => f.write_str(""),
}
}
}
#[allow(dead_code)]
#[cfg_attr(not(test), panic_handler)]
fn panic(info: &core::panic::PanicInfo) -> ! {
let location = info.location().unwrap(); // The panic location information is usually available, but it can be disabled by `panic_immediate_abort`.
let message = MessageWrapper {
message: info.message(),
}; // The panic message is not always available.
error!("ERROR: panic at '{}' at line {}, column {}:\n\n{:#?}\n\n{}", location.file(), location.line(), location.column(), info, message);
loop {}
}
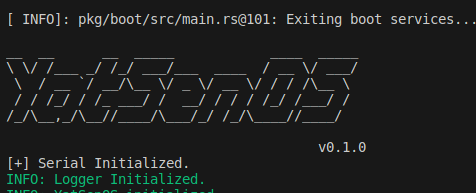
实验结果
全部工作完成后的结果:


实验总结
思考题&加分项
- 在 pkg/kernel 的
Cargo.toml中,指定了依赖中 boot 包为 default-features = false,这是为了避免什么问题?请结合 pkg/boot 的Cargo.toml谈谈你的理解。
在 Cargo.toml 文件中,default-features = false
的设置是用来禁用依赖包的默认功能。这是因为在某些情况下,我们可能不希望启用所有的默认功能,而只是需要依赖包的一部分功能。
在 pkg/boot 的 Cargo.toml 文件中,定义了两个 feature:boot 和
default。boot feature 启用了 uefi/alloc 和 uefi-services
两个功能,而 default feature 则启用了 boot
feature。这意味着,如果没有特别指定,依赖这个包的其他包将默认启用
uefi/alloc 和 uefi-services 两个功能。
- 在
pkg/boot/src/main.rs中参考相关代码,聊聊 max_phys_addr 是如何计算的,为什么要这么做?
max_phys_addr 是在代码中用来确定系统中最大的物理地址。它的计算是基于
UEFI
提供的内存映射信息,这些信息描述了系统中的所有物理内存区域,包括它们的起始地址、大小以及用途等信息。max_phys_addr
的计算过程如下:
let max_phys_addr = mmap
.entries()
.map(|m| m.phys_start + m.page_count * 0x1000)
.max()
.unwrap()
.max(0x1_0000_0000); // include IOAPIC MMIO area
在这段代码中,首先遍历了内存映射的所有条目。对于每一个条目,计算了它的结束地址(起始地址加上大小)。然后,从所有的结束地址中找出了最大的一个,这就是
max_phys_addr。
这么做的目的是为了确定系统中的全部物理内存范围,这对于后续的内存管理是非常重要的。例如,操作系统可能需要知道最大的物理地址,以便确定页表的大小,或者确定物理内存管理器的管理范围。
这里的 max(0x1_0000_0000) 是为了确保 max_phys_addr 至少是
0x1_0000_0000。这是因为在一些系统中,IOAPIC(输入/输出高级可编程中断控制器)的内存映射
I/O(MMIO)区域可能位于 0x1_0000_0000
地址,即使这个地址超过了实际的物理内存大小。为了能够正确地访问这个 MMIO
区域,需要确保 max_phys_addr 至少包括这个地址。
- 串口驱动是在进入内核后启用的,那么在进入内核之前,显示的内容是如何输出的?
在系统启动并进入内核之前,显示的内容通常通过固件(UEFI)提供的服务来输出。在这个阶段,操作系统还没有加载完全,所以不能依赖于操作系统提供的设备驱动。
对于 UEFI 系统,它提供了一套 Boot Services,这些服务包括一些基本的输入输出功能,例如读写文件,获取内存映射,以及在控制台上打印信息等。在代码中,这些服务被用来打印启动信息:
info!("Running UEFI bootloader...");
info! 宏在这里是通过 UEFI 的 Boot Services 来打印信息的。这是通过配置
log crate 的方式实现的,log crate 是 Rust
的一个日志框架,它允许你设置一个全局的日志处理器来处理所有的日志消息。在
UEFI 环境下,你可以设置一个日志处理器,这个处理器使用 UEFI 的 Boot
Services 来打印日志消息。
- 在 QEMU 中,我们通过指定 -nographic 参数来禁用图形界面,这样 QEMU 会默认将串口输出重定向到主机的标准输出
- 假如我们将 Makefile 中取消该选项,QEMU 的输出窗口会发生什么变化?请观察指令 make run QEMU_OUTPUT= 的输出,结合截图分析对应现象。
如果取消了 -nographic 选项,QEMU
的输出窗口会变成图形界面。在这种情况下,QEMU
会显示一个图形窗口,用来模拟虚拟机的显示设备。这个窗口会显示虚拟机的输出,包括启动信息、内核输出等。

- 在移除
-nographic的情况下,如何依然将串口重定向到主机的标准输入输出?
在makefile的 QEMU_ARGS 的定义中添加 -serial stdio 参数后正常使用make
run即可。
- 线控寄存器的每一比特都有特定的含义,尝试使用 bitflags 宏来定义这些标志位,并在 uart16550 驱动中使用它们。
见代码 uart16550.rs 。
- 尝试在进入内核并初始化串口驱动后,使用 escape sequence 来清屏,并编辑 get_ascii_header() 中的字符串常量,输出你的学号信息。
使用print!("\x1B[2J");清屏,同时加了一行学号信息。

- 尝试使用调试器,在内核初始化之后(
ysos::init调用结束后)下断点,查看、记录并解释如下的信息:
- 内核的栈指针、栈帧指针、指令指针等寄存器的值。
– 栈指针: rsp 的值为 0x0。
– 栈帧指针: rbp 的值为 0x0。
– 指令指针: rip 的值为 0xfff0。
这些值都是 0x0 或接近 0x0,这表明程序还在执行一些早期的初始化代码。
- 内核的代码段、数据段、BSS 段等在内存中的位置。
– 代码段(.text): 存放程序的机器代码。代码段的位置为
0xffffff000003b000 - 0xffffff0000076225。
– 数据段(.data): 存放初始化的全局和静态变量。数据段的位置为
0xffffff0000077000 - 0xffffff000007cd40。
– BSS 段(.bss): 存放未初始化的全局和静态变量。BSS 段的位置为
0xffffff000007e000 - 0xffffff000007e028。
这些值看起来都很合理,因为它们都在一个高地址范围内,这是典型的64位程序的特征。
- “开发者是愿意用安全换取灵活的”,所以,我要把代码加载到栈上去,可当我妄图在栈上执行代码的时候,却得到了 Segment fault,你能解决这个问题吗?
现代操作系统通常使用一种叫做数据执行保护DEP)的技术,以防止恶意代码在程序的数据区域(如栈或堆)中执行。这是一种安全机制,可以防止许多常见的安全漏洞,如缓冲区溢出攻击。可以使用execstack工具来禁用这个安全机制,但是这是一个非常危险的操作。
- 请尝试利用
gcc在Linux平台上编译一个简单的C语言程序,将其编译为ELF格式的文件,并尝试在栈上执行它,使它输出Hello, world!。
#include <string.h>
#include <stdio.h>
void (*func)();
int main() {
char code[] = {
0x48, 0x31, 0xc0, // xor %rax,%rax
0x48, 0xc7, 0xc7, 0x01, 0x00, // mov \$0x1,%rdi
0x00, 0x00,
0x48, 0xc7, 0xc2, 0x12, 0x00, // mov \$0xe,%rdx
0x00, 0x00,
0x48, 0x8d, 0x35, 0x0a, 0x00, // lea 0xa(%rip),%rsi
0x00, 0x00,
0xb8, 0x01, 0x00, 0x00, 0x00, // mov \$0x1,%eax
0x0f, 0x05, // syscall
0xb8, 0x3c, 0x00, 0x00, 0x00, // mov \$0x3c,%eax
0x0f, 0x05, // syscall
'H', 'e', 'l', 'l', 'o', ',',
' ', 'W', 'o', 'r', 'l', 'd',
'!', '\n'
};
func = (void (*)()) code;
func();
return 0;
}
