实验要求
-
了解中断的作用、中断的分类、中断的处理过程。
-
启用基于
APIC的中断,注册IDT中断处理程序,实现时钟中断。 -
注册内核堆分配器。(不实现内存分配算法,使用现有代码赋予内核堆分配能力)
-
实现串口驱动的输入能力,尝试进行基础的
IO操作和交互。
实验过程
GDT 与 TSS
阅读文档了解了x64 架构中的 GDT、TSS 和 IDT。同时在
src/memory/gdt.rs 中补全了TSS的中断栈表,为 Double Fault 和
Page Fault 准备独立的栈。
注册中断处理程序
先在mod.rs中初始化APIC(这里主要是调用后续完成的xapic.rs),然后在’exception.rs’中为各种常见的CPU异常注册中断处理程序。然后在src/interrupt
目录下创建 clock.rs 和 serial.rs 两个文件为后续工作做准备。
初始化 APIC
了解了APIC的工作原理,然后参照相关文档在xapic.rs中实现了APIC的初始化,主要完成的步骤如下:
-
检测系统是否存在
APIC。 -
确定
APIC的地址空间,即LAPIC和IOAPIC的MMIO地址空间,并将其映射到虚拟地址空间。 -
启用
APIC并设置Spurious IRQ Vector。 -
设置计时器相关寄存器。
-
禁用
LVT LINT0,LVT LINT1,LVT PCINT。 -
设置错误中断
LVT Error到对应的中断向量号。 -
清除错误状态寄存器。
-
向
EOI寄存器写入 0 以确认任何挂起的中断 -
设置
ICR寄存器。 -
设置
TPR寄存器为0,允许接收中断。
时钟中断
在clock.rs中使用原子操作实现了一个线程安全的全局计数器,可以在多线程环境下安全地对计数器进行读取和增加操作。
再在lib.rs中,所有组件初始化完毕后为CPU开启中断。(记得没错的话,这一部分不是由我完成的)
- 补全上述代码任务,并尝试修改你的代码,调节时钟中断的频率,并观察 QEMU 中的输出。说明你修改了哪些代码,如果想要中断的频率减半,应该如何修改?
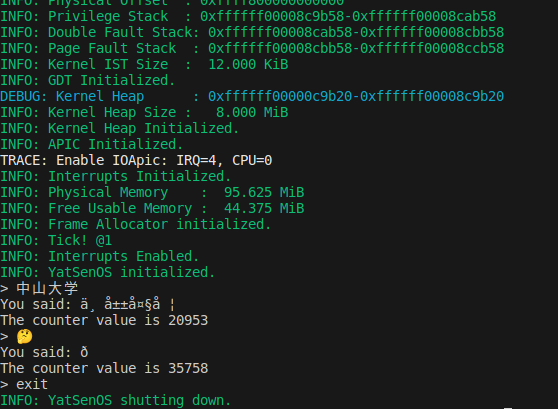
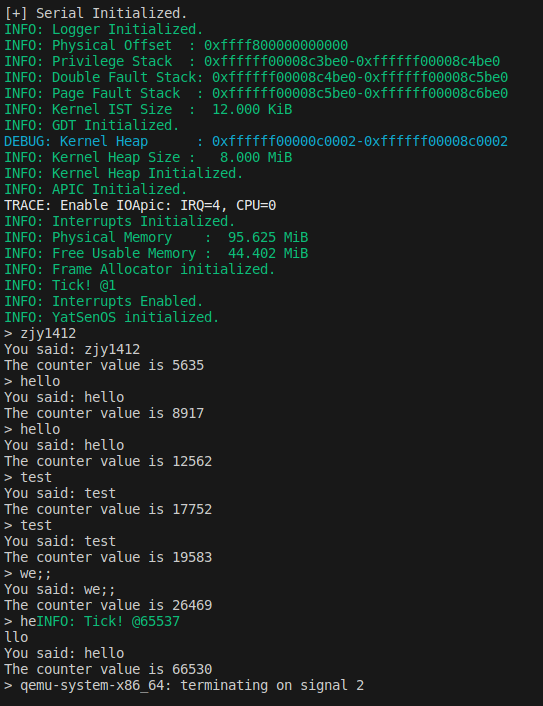
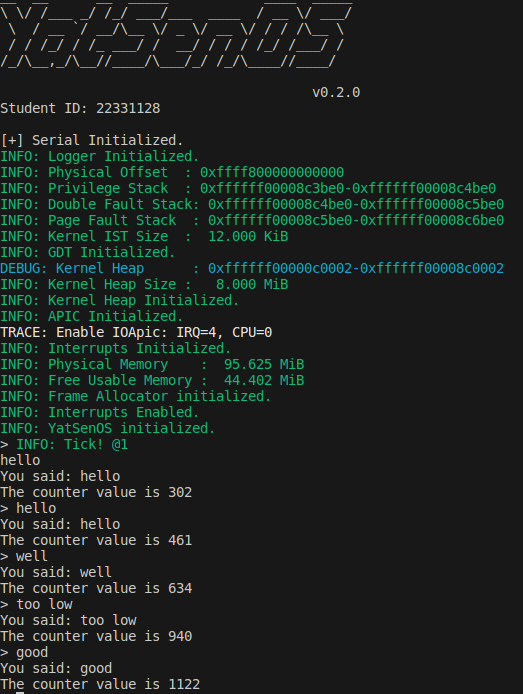
为了使得时钟中断的频率不同带来的效果更加显著,我分别将时钟中断的频率设置为正常频率(左图)和正常频率的1/128(右图)。
:::: box
::: {.columns-flow count=”2”}
 :::
::::
:::
::::
可以很明显地看到,右图中输出的计数器的值的变化明显更慢。
我将xapic.rs中的下面这一行的0b1011改为0b1010。如果想要中断的频率减半,则应该改为0b0000。
self.write(DIVIDE_CONFIGURATION, 0b1011);
串口输入中断
在uart16550.rs为串口设备开启中断,再在mod.rs里为 IOAPIC 启用对应的
IRQ。
接着创建src/drivers/input.rs,我选择推荐的crossbeam_queue::ArrayQueue
作为缓冲区的实现,使用lazy_static初始化INPUT_BUFFER,再利用所提供的try_pop_key函数实现pop_key函数,最后依照给定的逻辑实现get_line函数。
实现完’input.rs’后,我在serial.rs中调用push_key函数完成receive函数。
用户交互
将src/main.rs替换成所给的代码,其中使用了get_line函数来获取用户输入的一行数据,并将其打印出来,实现响应用户输入的操作。
关键代码
gdt.rs
tss.interrupt_stack_table[DOUBLE_FAULT_IST_INDEX as usize] = {
const STACK_SIZE: usize = IST_SIZES[1];
static mut STACK: [u8; STACK_SIZE] = [0; STACK_SIZE];
let stack_start = VirtAddr::from_ptr(unsafe { STACK.as_ptr() });
let stack_end = stack_start + STACK_SIZE;
info!(
"Double Fault Stack: 0x{:016x}-0x{:016x}",
stack_start.as_u64(),
stack_end.as_u64()
);
stack_end
};
tss.interrupt_stack_table[PAGE_FAULT_IST_INDEX as usize] = {
const STACK_SIZE: usize = IST_SIZES[2];
static mut STACK: [u8; STACK_SIZE] = [0; STACK_SIZE];
let stack_start = VirtAddr::from_ptr(unsafe { STACK.as_ptr() });
let stack_end = stack_start + STACK_SIZE;
info!(
"Page Fault Stack : 0x{:016x}-0x{:016x}",
stack_start.as_u64(),
stack_end.as_u64()
);
stack_end
};
mod.rs
fn init() {
IDT.load();
// FIXME: check and init APIC
if XApic::support() {
let mut lapic = unsafe { XApic::new(physical_to_virtual(LAPIC_ADDR)) };
lapic.cpu_init();
info!("APIC Initialized.");
} else {
panic!("APIC not supported!");
}
// FIXME: enable serial irq with IO APIC (use enable_irq)
enable_irq(Irq::Serial0 as u8, 0); // enable IRQ4 for CPU0
info!("Interrupts Initialized.");
}
exceptions.rs
pub unsafe fn register_idt(idt: &mut InterruptDescriptorTable) {
...
// TODO: you should handle more exceptions here
// especially gerneral protection fault (GPF)
// see: https://wiki.osdev.org/Exceptions
idt.debug.set_handler_fn(debug_handler);
idt.breakpoint.set_handler_fn(breakpoint_handler);
idt.overflow.set_handler_fn(overflow_handler);
idt.bound_range_exceeded.set_handler_fn(bound_range_exceeded_handler);
idt.invalid_opcode.set_handler_fn(invalid_opcode_handler);
idt.device_not_available.set_handler_fn(device_not_available_handler);
idt.invalid_tss.set_handler_fn(invalid_tss_handler);
idt.segment_not_present.set_handler_fn(segment_not_present_handler);
idt.stack_segment_fault.set_handler_fn(stack_segment_fault_handler);
idt.general_protection_fault.set_handler_fn(general_protection_fault_handler);
idt.non_maskable_interrupt.set_handler_fn(non_maskable_interrupt_handler);
idt.x87_floating_point.set_handler_fn(x87_floating_point_handler);
idt.alignment_check.set_handler_fn(alignment_check_handler);
idt.machine_check.set_handler_fn(machine_check_handler);
idt.simd_floating_point.set_handler_fn(simd_floating_point_handler);
idt.virtualization.set_handler_fn(virtualization_handler);
idt.security_exception.set_handler_fn(security_exception_handler);
}
...
pub extern "x86-interrupt" fn debug_handler(stack_frame: InterruptStackFrame) {
panic!("EXCEPTION: DEBUG\n\n{:#?}", stack_frame);
}
pub extern "x86-interrupt" fn breakpoint_handler(stack_frame: InterruptStackFrame) {
panic!("EXCEPTION: BREAKPOINT\n\n{:#?}", stack_frame);
}
pub extern "x86-interrupt" fn overflow_handler(stack_frame: InterruptStackFrame) {
panic!("EXCEPTION: OVERFLOW\n\n{:#?}", stack_frame);
}
pub extern "x86-interrupt" fn bound_range_exceeded_handler(stack_frame: InterruptStackFrame) {
panic!("EXCEPTION: BOUND RANGE EXCEEDED\n\n{:#?}", stack_frame);
}
pub extern "x86-interrupt" fn invalid_opcode_handler(stack_frame: InterruptStackFrame) {
panic!("EXCEPTION: INVALID OPCODE\n\n{:#?}", stack_frame);
}
pub extern "x86-interrupt" fn device_not_available_handler(stack_frame: InterruptStackFrame) {
panic!("EXCEPTION: DEVICE NOT AVAILABLE\n\n{:#?}", stack_frame);
}
pub extern "x86-interrupt" fn invalid_tss_handler(
stack_frame: InterruptStackFrame,
error_code: u64,
) {
panic!(
"EXCEPTION: INVALID TSS, ERROR_CODE: 0x{:016x}\n\n{:#?}",
error_code, stack_frame
);
}
pub extern "x86-interrupt" fn segment_not_present_handler(
stack_frame: InterruptStackFrame,
error_code: u64,
) {
panic!(
"EXCEPTION: SEGMENT NOT PRESENT, ERROR_CODE: 0x{:016x}\n\n{:#?}",
error_code, stack_frame
);
}
pub extern "x86-interrupt" fn stack_segment_fault_handler(
stack_frame: InterruptStackFrame,
error_code: u64,
) {
panic!(
"EXCEPTION: STACK SEGMENT FAULT, ERROR_CODE: 0x{:016x}\n\n{:#?}",
error_code, stack_frame
);
}
pub extern "x86-interrupt" fn general_protection_fault_handler(
stack_frame: InterruptStackFrame,
error_code: u64,
) {
panic!(
"EXCEPTION: GENERAL PROTECTION FAULT, ERROR_CODE: 0x{:016x}\n\n{:#?}",
error_code, stack_frame
);
}
pub extern "x86-interrupt" fn non_maskable_interrupt_handler(stack_frame: InterruptStackFrame) {
panic!("EXCEPTION: NON MASKABLE INTERRUPT\n\n{:#?}", stack_frame);
}
pub extern "x86-interrupt" fn x87_floating_point_handler(stack_frame: InterruptStackFrame) {
panic!("EXCEPTION: X87 FLOATING POINT\n\n{:#?}", stack_frame);
}
pub extern "x86-interrupt" fn alignment_check_handler(stack_frame: InterruptStackFrame, error_code: u64) {
panic!("EXCEPTION: ALIGNMENT CHECK, ERROR_CODE: 0x{:016x}\n\n{:#?}", error_code, stack_frame);
}
pub extern "x86-interrupt" fn machine_check_handler(stack_frame: InterruptStackFrame) -> ! {
panic!("EXCEPTION: MACHINE CHECK\n\n{:#?}", stack_frame);
}
pub extern "x86-interrupt" fn simd_floating_point_handler(stack_frame: InterruptStackFrame) {
panic!("EXCEPTION: SIMD FLOATING POINT\n\n{:#?}", stack_frame);
}
pub extern "x86-interrupt" fn virtualization_handler(stack_frame: InterruptStackFrame) {
panic!("EXCEPTION: VIRTUALIZATION\n\n{:#?}", stack_frame);
}
pub extern "x86-interrupt" fn security_exception_handler(stack_frame: InterruptStackFrame, error_code: u64) {
panic!("EXCEPTION: SECURITY EXCEPTION, ERROR_CODE: 0x{:016x}\n\n{:#?}", error_code, stack_frame);
}
serial.rs
fn receive() {
// FIXME: receive character from uart 16550, put it into INPUT_BUFFER
let mut serial_port = SerialPort::new(0x3F8); // COM1
while let Some(data) = serial_port.receive() {
push_key(data as Key);
}
}
xapic.rs
// Define the constants for the registers
const LAPIC_ID: u32 = 0x020;
const LAPIC_VERSION: u32 = 0x030;
const TASK_PRIORITY: u32 = 0x080;
const EOI: u32 = 0x0B0;
const LOGICAL_DESTINATION: u32 = 0x0D0;
const DESTINATION_FORMAT: u32 = 0x0E0;
const SPURIOUS_INTERRUPT_VECTOR: u32 = 0x0F0;
const ERROR_STATUS: u32 = 0x280;
const LVT_CMCI: u32 = 0x2F0;
const INTERRUPT_COMMAND: u32 = 0x300;
const INTERRUPT_COMMAND_HIGH: u32 = 0x310;
const LVT_TIMER: u32 = 0x320;
const LVT_THERMAL_SENSOR: u32 = 0x330;
const LVT_PCINT: u32 = 0x340;
const LVT_LINT0: u32 = 0x350;
const LVT_LINT1: u32 = 0x360;
const LVT_ERROR: u32 = 0x370;
const INITIAL_COUNT: u32 = 0x380;
const CURRENT_COUNT: u32 = 0x390;
const DIVIDE_CONFIGURATION: u32 = 0x3E0;
pub struct XApic {
addr: u64,
}
impl XApic {
pub unsafe fn new(addr: u64) -> Self {
XApic { addr }
}
unsafe fn read(&self, reg: u32) -> u32 {
read_volatile((self.addr + reg as u64) as *const u32)
}
unsafe fn write(&mut self, reg: u32, value: u32) {
write_volatile((self.addr + reg as u64) as *mut u32, value);
self.read(0x20);
}
}
//Define the constants for the registers
const LAPIC_ID: u32 = 0x020;
const LAPIC_VERSION: u32 = 0x030;
const TASK_PRIORITY: u32 = 0x080;
const EOI: u32 = 0x0B0;
const LOGICAL_DESTINATION: u32 = 0x0D0;
const DESTINATION_FORMAT: u32 = 0x0E0;
const SPURIOUS_INTERRUPT_VECTOR: u32 = 0x0F0;
const ERROR_STATUS: u32 = 0x280;
const LVT_CMCI: u32 = 0x2F0;
const INTERRUPT_COMMAND: u32 = 0x300;
const INTERRUPT_COMMAND_HIGH: u32 = 0x310;
const LVT_TIMER: u32 = 0x320;
const LVT_THERMAL_SENSOR: u32 = 0x330;
const LVT_PCINT: u32 = 0x340;
const LVT_LINT0: u32 = 0x350;
const LVT_LINT1: u32 = 0x360;
const LVT_ERROR: u32 = 0x370;
const INITIAL_COUNT: u32 = 0x380;
const CURRENT_COUNT: u32 = 0x390;
const DIVIDE_CONFIGURATION: u32 = 0x3E0;
bitflags! {
pub struct SpuriousInterruptVectorFlags: u32 {
const ENABLE = 1 << 8;
const VECTOR = 0xFF;
}
}
bitflags! {
pub struct LvtTimerFlags: u32 {
const MASK = 1 << 16;
const PERIODIC_MODE = 1 << 17;
const VECTOR = 0xFF;
}
}
bitflags! {
pub struct LvtLintFlags: u32 {
const MASK = 1 << 16;
}
}
bitflags! {
pub struct LvtPcintFlags: u32 {
const MASK = 1 << 16;
}
}
bitflags! {
pub struct LvtErrorFlags: u32 {
const VECTOR = 0xFF;
}
}
bitflags! {
pub struct InterruptCommandFlags: u32 {
const BCAST = 1 << 19;
const INIT = 5 << 8;
const TMLV = 1 << 15;
const DS = 1 << 12;
}
}
bitflags! {
pub struct DivideConfigurationFlags: u32 {
const DIVIDE_BY_1 = 0b1011;
}
}
bitflags! {
pub struct InitialCountFlags: u32 {
const COUNT = 0x20000;
}
}
pub struct XApic {
addr: u64,
}
impl XApic {
pub unsafe fn new(addr: u64) -> Self {
XApic { addr }
}
unsafe fn read(&self, reg: u32) -> u32 {
read_volatile((self.addr + reg as u64) as *const u32)
}
unsafe fn write(&mut self, reg: u32, value: u32) {
write_volatile((self.addr + reg as u64) as *mut u32, value);
self.read(0x20);
}
}
impl LocalApic for XApic {
/// If this type APIC is supported
fn support() -> bool {
// FIXME: Check CPUID to see if xAPIC is supported.
CpuId::new().get_feature_info().map(|f| f.has_apic()).unwrap_or(false)
}
/// Initialize the xAPIC for the current CPU.
fn cpu_init(&mut self) {
unsafe {
// FIXME: Enable local APIC; set spurious interrupt vector.
let mut spiv = self.read(SPURIOUS_INTERRUPT_VECTOR);
spiv |= SpuriousInterruptVectorFlags::ENABLE.bits(); // set EN bit
// clear and set Vector
spiv &= !SpuriousInterruptVectorFlags::VECTOR.bits();
spiv |= Interrupts::IrqBase as u32 + Irq::Spurious as u32;
self.write(SPURIOUS_INTERRUPT_VECTOR, spiv);
// FIXME: The timer repeatedly counts down at bus frequency
let mut lvt_timer = self.read(LVT_TIMER);
// clear and set Vector
lvt_timer &= !LvtTimerFlags::VECTOR.bits();
lvt_timer |= Interrupts::IrqBase as u32 + Irq::Timer as u32;
lvt_timer &= !LvtTimerFlags::MASK.bits();
lvt_timer |= LvtTimerFlags::PERIODIC_MODE.bits();
self.write(LVT_TIMER, lvt_timer);
// FIXME: Disable logical interrupt lines (LINT0, LINT1)
self.write(LVT_LINT0, LvtLintFlags::MASK.bits());
self.write(LVT_LINT1, LvtLintFlags::MASK.bits());// set Mask
// FIXME: Disable performance counter overflow interrupts (PCINT)
self.write(LVT_PCINT, LvtPcintFlags::MASK.bits()); // set Mask
// FIXME: Map error interrupt to IRQ_ERROR.
let mut lvt_error = self.read(LVT_ERROR);
// clear and set Vector
lvt_error &= !LvtErrorFlags::VECTOR.bits();
lvt_error |= Interrupts::IrqBase as u32 + Irq::Error as u32;
self.write(LVT_ERROR, lvt_error);
// FIXME: Clear error status register (requires back-to-back writes).
self.write(ERROR_STATUS, 0);
self.write(ERROR_STATUS, 0);
// FIXME: Ack any outstanding interrupts.
self.write(EOI, 0);
// FIXME: Send an Init Level De-Assert to synchronise arbitration ID's.
self.write(INTERRUPT_COMMAND_HIGH, 0); // set ICR 0x310
let mut icr = 0;
icr |= InterruptCommandFlags::BCAST.bits();
icr |= InterruptCommandFlags::INIT.bits();
icr |= InterruptCommandFlags::TMLV.bits();
self.write(INTERRUPT_COMMAND, icr); // set ICR 0x300
while self.read(INTERRUPT_COMMAND) & InterruptCommandFlags::DS.bits() != 0 {} // wait for delivery status
// FIXME: Enable interrupts on the APIC (but not on the processor).
self.write(DIVIDE_CONFIGURATION, DivideConfigurationFlags::DIVIDE_BY_1.bits());
self.write(INITIAL_COUNT, InitialCountFlags::COUNT.bits());
}
// NOTE: Try to use bitflags! macro to set the flags.
}
clock.rs
static COUNTER: /* FIXME */ AtomicU64 = /* FIXME */ AtomicU64::new(0);
#[inline]
pub fn read_counter() -> u64 {
// FIXME: load counter value
COUNTER.load(Ordering::SeqCst)
}
#[inline]
pub fn inc_counter() -> u64 {
// FIXME: read counter value and increase it
COUNTER.fetch_add(1, Ordering::SeqCst)
}
uart16550.rs
self.interrupt_enable.write(0x01);
input.rs
use crossbeam_queue::ArrayQueue;
use lazy_static::lazy_static;
use log::warn;
use alloc::string::String;
use crate::drivers::serial::*;
type Key = u8;
lazy_static! {
static ref INPUT_BUF: ArrayQueue<Key> = ArrayQueue::new(128);
}
#[inline]
pub fn push_key(key: Key) {
if INPUT_BUF.push(key).is_err() {
warn!("Input buffer is full. Dropping key '{:?}'", key);
}
}
#[inline]
pub fn try_pop_key() -> Option<Key> {
INPUT_BUF.pop()
}
pub fn pop_key() -> Key {
loop {
if let Some(key) = try_pop_key() {
return key;
}
}
}
pub fn get_line() -> String {
let mut line = String::with_capacity(128);
loop {
let key = pop_key();
match key {
0x08 | 0x7F => { // Backspace or delete
if !line.is_empty() {
line.pop();
backspace();
}
}
b'\n' | b'\r'=> {
println!();
return line;
}
key => {
line.push(key as char);
print(key as char);
}
}
}
}
实验结果
全部工作完成后的用户交互的结果: 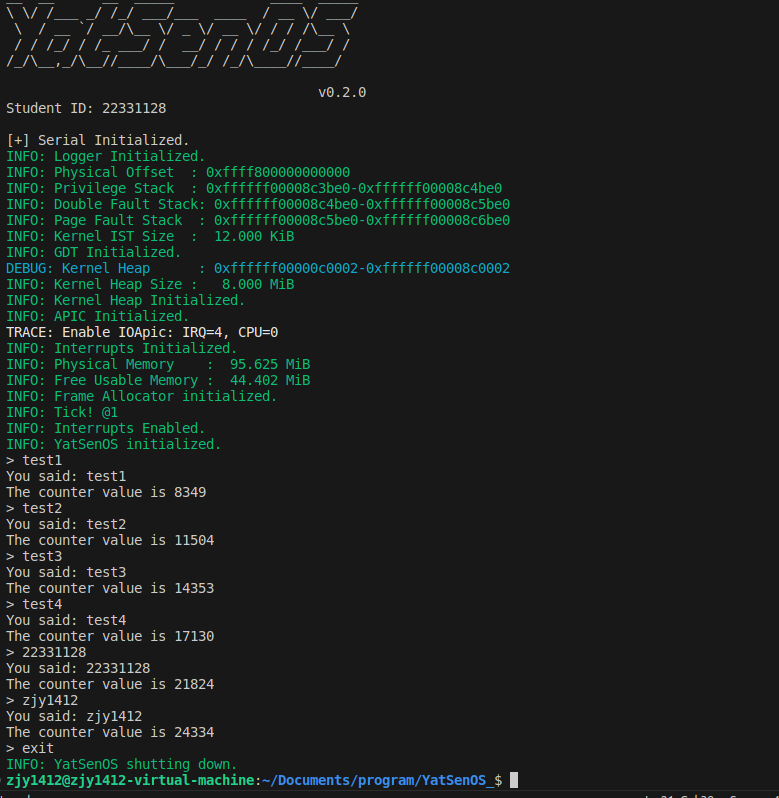
实验总结
在本次实验中,我了解了中断的作用、中断的分类、中断的处理过程。我成功地启用了基于
APIC 的中断,注册了 IDT
中断处理程序,并实现了时钟中断。我还注册了内核堆分配器,并实现了串口驱动的输入能力。在完成这些任务的过程中,我深入地理解了中断处理的工作原理,并掌握了如何使用
GDB
调试器进行调试。我还尝试了不同的时钟中断频率,并观察了它们对系统性能的影响。此外,我还尝试了触发不同的
CPU 异常,并观察了它们的发生过程。
思考题&加分项
- 为什么需要在
clock_handler中使用without_interrupts函数?如果不使用它,可能会发生什么情况?
without_interrupts函数是用来禁止中断的。在处理一个中断时,我们通常不希望在这个过程中又被其他的中断打断。而在clock_handler函数中,我们首先增加了一个计数器,然后检查这个计数器的值,如果它是0x10000的倍数,那么就输出一条消息。这个过程需要是原子的,也就是说,在增加计数器并检查它的值的过程中,我们不希望被其他的中断打断,所以要使用without_interrupts。
如果不使用without_interrupts,那么在处理一个中断的过程中,可能会被其他的中断打断,这样就会导致计数器的值不准确,从而导致输出的消息不准确。
- 考虑时钟中断进行进程调度的场景,时钟中断的频率应该如何设置?太快或太慢的频率会带来什么问题?请分别回答。
如果想要调整时钟中断的频率,你需要修改计时器的配置,例如TDCR(分频系数)和TICR(初始计数值)。这些寄存器的设置决定了时钟中断的频率。
太快的中断频率:如果时钟中断的频率太快,那么中断处理程序就会频繁地被调用。这可能会导致每次中断都会产生一定的CPU开销,因为需要保存和恢复CPU的状态,以及执行中断处理程序。如果中断发生的频率太高,那么这些开销可能会变得非常显著,从而降低系统的整体性能。
太慢的中断频率:相反,如果时钟中断的频率太慢,那么可能会有以下问题:
响应性差:如果你使用时钟中断来进行进程调度,那么中断的频率会影响到你的系统的响应性。具体来说,如果中断的频率太低,那么当一个进程准备好运行时,它可能需要等待很长时间才能得到CPU。这可能会导致用户感觉到系统反应迟钝。
时间精度差:时钟中断的频率也会影响到你的系统的时间精度。如果中断的频率太低,那么你的系统可能无法准确地测量时间,或者无法准确地执行需要精确时间的任务。
- 在进行
receive操作的时候,为什么无法进行日志输出?如果强行输出日志,会发生什么情况?谈谈你对串口、互斥锁的认识。
在receive函数中,我们通常不会进行日志输出,主要是因为日志输出可能会引发新的中断,从而导致重入问题。重入是指当一个中断处理程序正在运行时,同一个中断又再次发生,导致中断处理程序被再次调用。这可能会导致各种问题,例如数据的不一致或者死锁。
互斥锁是一种用于保护共享资源的同步机制。当一个线程想要访问一个被互斥锁保护的资源时,它首先需要获得这个互斥锁。如果互斥锁已经被其他线程持有,那么这个线程就会被阻塞,直到互斥锁被释放。
如果在receive函数中强行输出日志,那么可能会引发新的中断。例如,如果你的日志输出函数会向串口写数据,那么这可能会触发一个串口中断。因为serial_handler函数还在运行,所以这可能会导致重入问题。此外,日志输出函数使用了互斥锁来保护共享资源,那么在中断处理程序中调用这个函数可能会导致死锁。因为在中断处理程序中,你不能等待互斥锁,否则可能会导致整个系统挂起。
- 输入缓冲区在什么情况下会满?如果缓冲区满了,用户输入的数据会发生什么情况?
输入缓冲区可能在以下情况下满:
-
用户输入的数据速度超过了程序处理数据的速度。如果用户连续快速地输入数据,而程序处理这些数据的速度跟不上,那么输入缓冲区就可能会满。
-
程序长时间没有读取缓冲区中的数据。如果程序在一段时间内没有读取缓冲区中的数据,那么新的输入数据就会不断地积累,可能导致缓冲区满。
如果输入缓冲区满了,那么新的输入数据可能会被丢弃,或者替换掉缓冲区中的旧数据。
- 进行下列尝试,并在报告中保留对应的触发方式及相关代码片段:
a. 尝试用你的方式触发 Triple Fault,开启 intdbg 对应的选项,在 QEMU
中查看调试信息,分析 Triple Fault 的发生过程。
在main.rs中,我故意让程序访问一个无效的内存地址,从而先触发Page Fault,但是我同时注释掉了Page Fault和Double Fault的处理程序,这样就会直接导致Triple Fault。
main.rs:
pub fn kernel_main(boot_info: &'static boot::BootInfo) -> ! {
ysos::init(boot_info);
unsafe {
asm!(
"mov rax, 28",
"mov [0xdeadbeef], rax",
options(nostack)
);
}
loop {
print!("> ");
let input = input::get_line();
match input.trim() {
"exit" => break,
_ => {
println!("You said: {}", input);
println!("The counter value is {}", interrupt::clock::read_counter());
}
}
}
ysos::shutdown(boot_info);
}
double_fault_handler 和 page_fault_handler:
pub unsafe fn register_idt(idt: &mut InterruptDescriptorTable) {
idt.divide_error.set_handler_fn(divide_error_handler);
// idt.double_fault
// .set_handler_fn(double_fault_handler)
// .set_stack_index(gdt::DOUBLE_FAULT_IST_INDEX);
// idt.page_fault
// .set_handler_fn(page_fault_handler)
// .set_stack_index(gdt::PAGE_FAULT_IST_INDEX);
...
}
:::: box
::: {.columns-flow count=”2”}
 第一次异常(异常代码0xE)是一个页错误(Page
Fault),可以看到CR2寄存器的值是ffffffffdeadbeef,这是一个无效的地址。
第一次异常(异常代码0xE)是一个页错误(Page
Fault),可以看到CR2寄存器的值是ffffffffdeadbeef,这是一个无效的地址。
第二次异常(异常代码0xB)是一个不可恢复的错误(NMI),这是由于处理第一次异常时发生的错误引起的。
第三次异常(异常代码0x8)是一个双重错误(Double Fault),这是由于处理前两个异常时发生的错误引起的。当处理器无法处理一个异常时,它会尝试调用双重错误处理程序。然而,如果双重错误处理程序也无法处理这个异常,就会发生一个三重错误(Triple Fault)。 ::: ::::
b. 尝试触发 Double Fault,观察 Double Fault
的发生过程,尝试通过调试器定位 Double Fault
发生时使用的栈是否符合预期。
代码和上面类似的,只是少注释掉了Double Fault的处理程序。过程也和上面类似,触发完Page Fault后,因为没有相关的处理程序,所以会直接触发Double Fault。

 观察上面的信息可得,
观察上面的信息可得,Double Fault发生时使用的栈是我们预期的栈。
c. 通过访问非法地址触发 Page Fault,观察 Page Fault
的发生过程。分析 Cr2 寄存器的值,并尝试回答为什么 Page Fault
属于可恢复的异常。
代码和上面类似的,只是少注释掉了Page Fault和Double Fault的处理程序。过程也和上面类似,因为访问无效地址直接触发Page Fault。

在这个输出中,我们可以看到 v=0e说明触发了页错误, CR2 寄存器的值是
ffffffffdeadbeef。在 x86 架构中,当发生页错误(Page Fault)时,CPU
会将引起错误的线性地址存储在 CR2 寄存器中。ffffffffdeadbeef
是一个预期的无效的地址。
页错误本身是可以恢复的,因为它可以被操作系统的页错误处理程序处理。当页错误处理程序被调用时,它可以根据错误的类型和引起错误的地址来决定如何处理这个错误。例如,如果一个程序尝试访问一个尚未映射的虚拟内存地址,页错误处理程序可以选择将相应的物理内存页映射到这个地址,然后重新执行引起错误的指令。这就是为什么页错误被认为是可恢复的。
- 如果在
TSS中为中断分配的栈空间不足,会发生什么情况?请分析 CPU 异常的发生过程,并尝试回答什么时候会发生Triple Fault。
如果 TSS
中为中断分配的栈空间不足,那么当尝试切换到这个栈时,处理器会触发一个
Stack Fault(double_fault)。这是因为处理器需要足够的栈空间来保存中断或异常的上下文信息,包括各种寄存器的值和返回地址等。这种情况下,处理器会尝试调用Double Fault Handler。如果Double Fault Handler
的栈也不足,那么处理器将会触发 Triple Fault。
关于 CPU 异常的发生过程,大致可以分为以下几个步骤:
-
当 CPU 检测到一个异常条件(例如除以零、访问无效的内存地址等)时,它会停止当前的指令流,并开始执行一个预定的中断处理程序。
-
CPU 会将当前的上下文信息(包括各种寄存器的值和返回地址等)保存到栈上,然后切换到
TSS中指定的栈。 -
CPU 会开始执行中断处理程序。这个程序通常会分析异常的原因,然后尝试修复它,或者打印一条错误信息并停止程序的执行。
-
如果在处理一个异常时发生了另一个异常(例如在处理除零错误时发生了
Stack Fault),那么 CPU 会开始执行另一个中断处理程序,这就是所谓的Double Fault。 -
如果在处理
Double Fault时又发生了另一个异常,那么 CPU 会触发一个Triple Fault。在大多数情况下,这会导致系统重启。
所以,Triple Fault
通常发生在处理一个异常或中断时,由于某种原因(例如栈空间不足、内存错误等)导致处理器无法正确地处理这个异常,然后在尝试处理这个新的异常时又发生了第三个异常。这是一个非常严重的错误条件,通常会导致系统崩溃或重启。
- 在未使用
set_stack_index函数时,中断处理程序的栈可能哪里?尝试结合 gdb 调试器,找到中断处理程序的栈,并验证你的猜想是否正确。
在没有明确使用 set_stack_index
函数来设置特定的中断或异常的栈时,处理器默认会使用当前任务的栈来处理中断或异常。这意味着,中断处理程序的栈可能是当前任务的栈,也就是在发生中断前处理器正在使用的栈。
不对Page Fault使用set_stack_index函数后再触发Page Fault,然后在gdb中查看栈的情况。

 可以看到栈顶的位置和rsp寄存器的值是一样的,这说明中断处理程序的栈是当前任务的栈。
可以看到栈顶的位置和rsp寄存器的值是一样的,这说明中断处理程序的栈是当前任务的栈。
- 为全部可能的 CPU 异常设置对应的处理程序,使用 panic! 输出异常信息。
详见代码。
- 你如何定义用于计数的
COUNTER,它能够做到线程安全吗?如果不能,如何修改?
我使用了
AtomicU64,这是一个原子类型,它提供了一种线程安全的方式来进行读、写和其他原子操作。原子类型的操作都是原子的,这意味着它们在多线程环境中不会被其他线程打断。这就保证了在并发环境中的线程安全。
- 操作
APIC时存在大量比特操作,尝试结合使用bitflags和bit_field来定义和操作这些寄存器的值,从而获得更好的可读性。
对于寄存器,我还是选择使用常量(const),而对于那些操作寄存器所用到的位,则使用了bitflags和bit_field。详见代码。
- 你的串口输入驱动是否能正确的处理中文甚至 emoji 输入?如何能够正确处理?
我的串口输入驱动目前只能处理 ASCII 字符,对于中文和 emoji
输入,需要进行字符编码的转换。具体来说,需要将中文和 emoji 字符转换为
UTF-8 编码,然后再进行处理。这可能需要使用一些在 #![no_std]
环境下支持字符编码库,